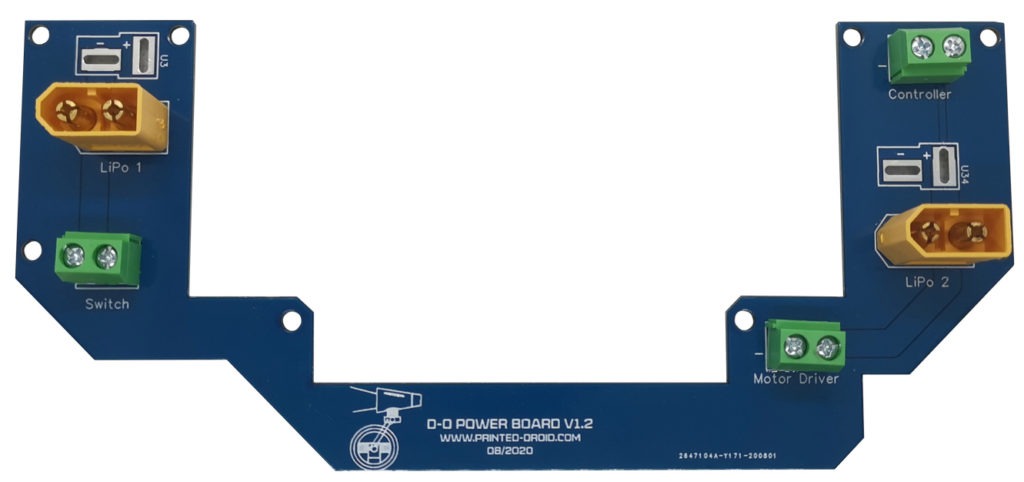
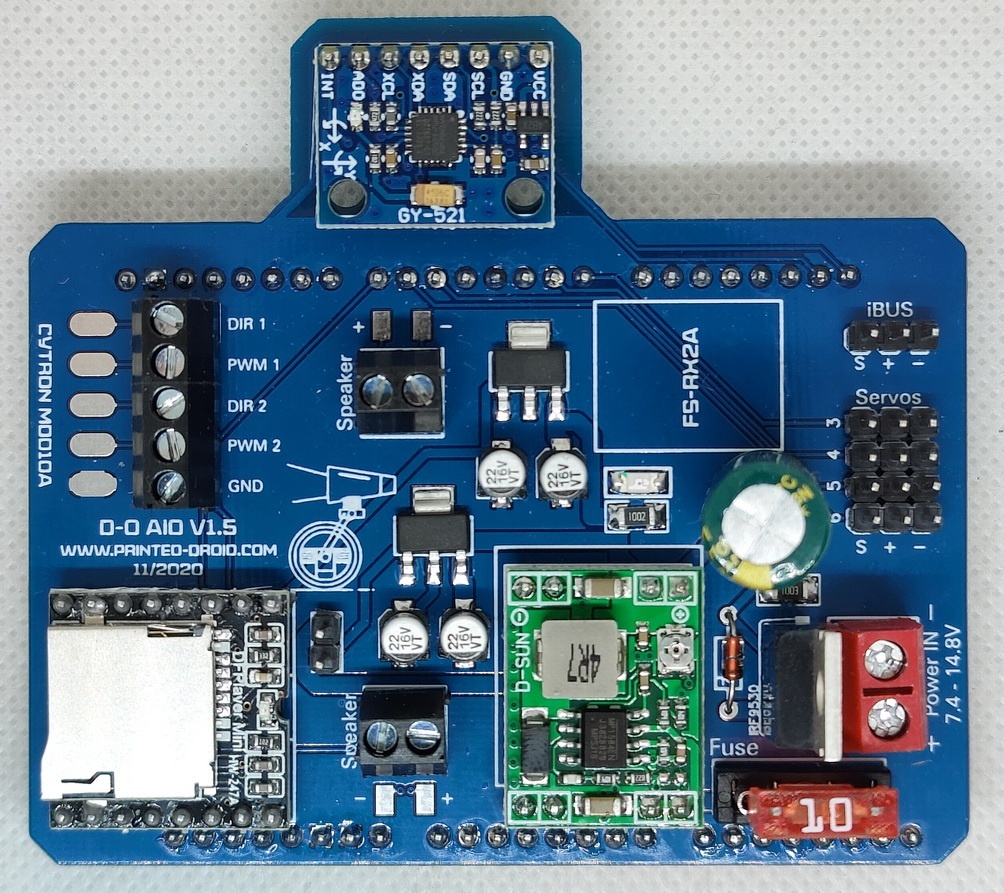
The D-O V2 control and power pcbs are made for Michael Baddeleys D-O V2.
They reduce the wiring to a minimum.
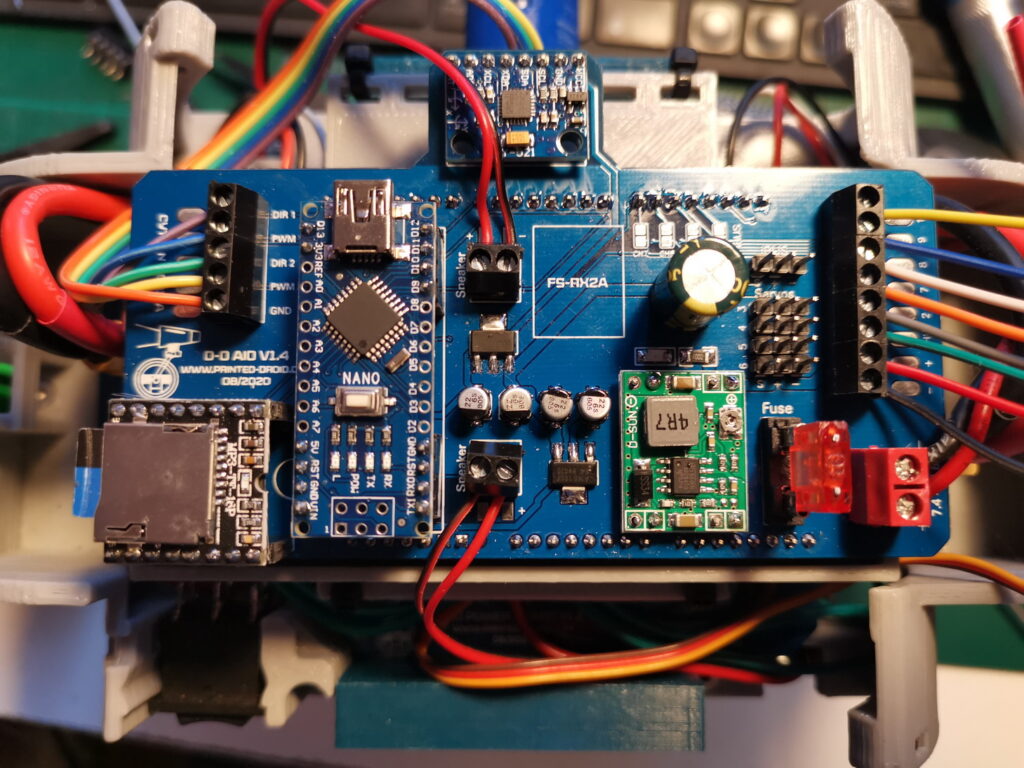
There are 2 Versions. The big one is designed for a bigger 10ch Receiver (that is connected via Ch. 2 & 7-10) and needs the Arduino Nano (unless you run the iBUS sketch).
The smaller board is iBUS only (perfect for the small 10ch iBUS receiver)
The D-O stand in the attachment is for testing everything without mounted “wheels”.
Available at shop.printed-droid.com
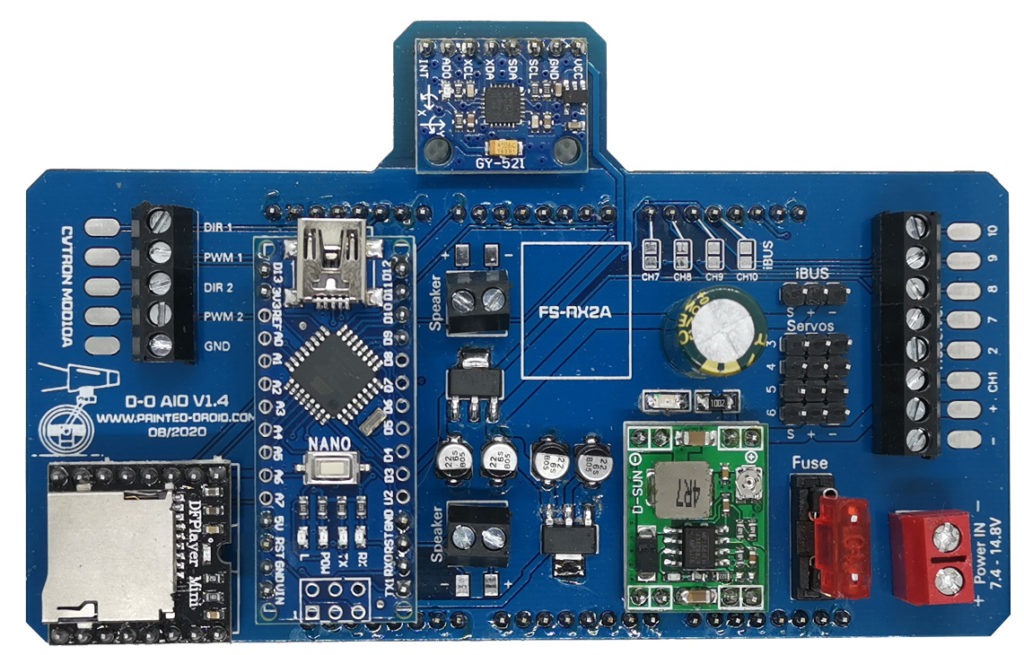
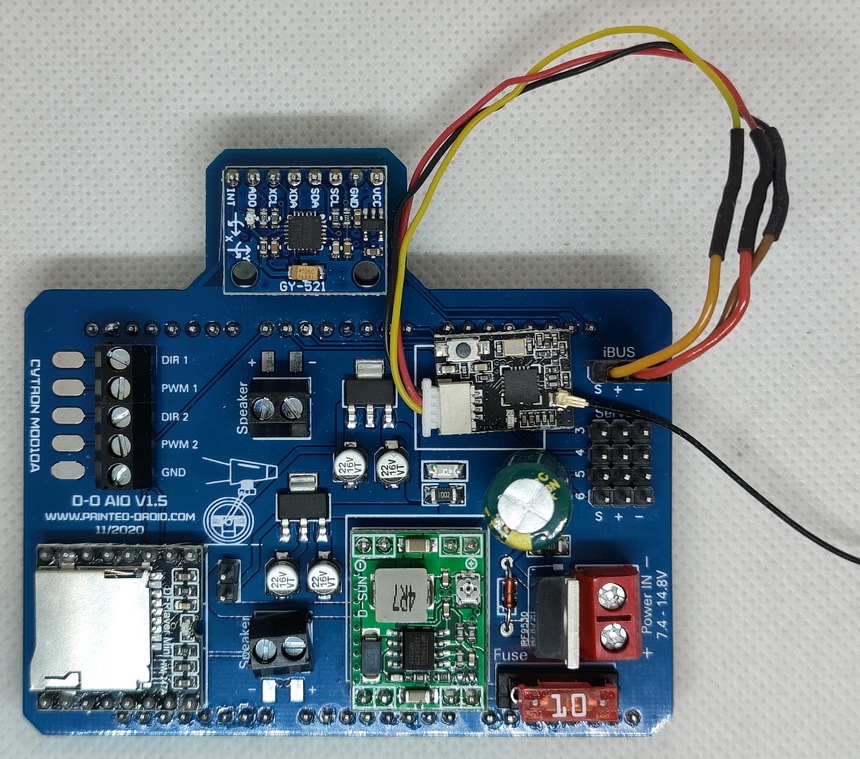
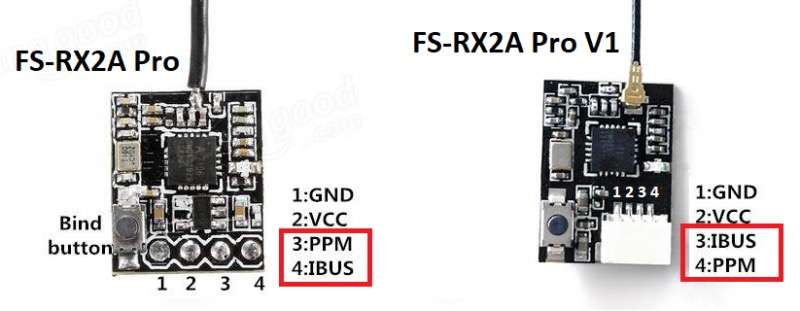
Receiver wiring:
The FS-RX2A Pro receiver will also work well (all versions). Be carefull with the wiring:
How to bind:
• 1. Press and hold the Binding button, and supply power to the receiver, blue LED blinks fast means entering the binding mode.
• 2. Make the transmitter enter BIND mode.
• 3. The LED indicator become slowly blink means the binding is succeed.
• 4. Make the transmitter quit the BIND mode, the receiver LED indicator stay on means receiving signal.
• 1. Press and hold the Binding button, and supply power to the receiver, blue LED blinks fast means entering the binding mode.
• 2. Make the transmitter enter BIND mode.
• 3. The LED indicator become slowly blink means the binding is succeed.
• 4. Make the transmitter quit the BIND mode, the receiver LED indicator stay on means receiving signal.
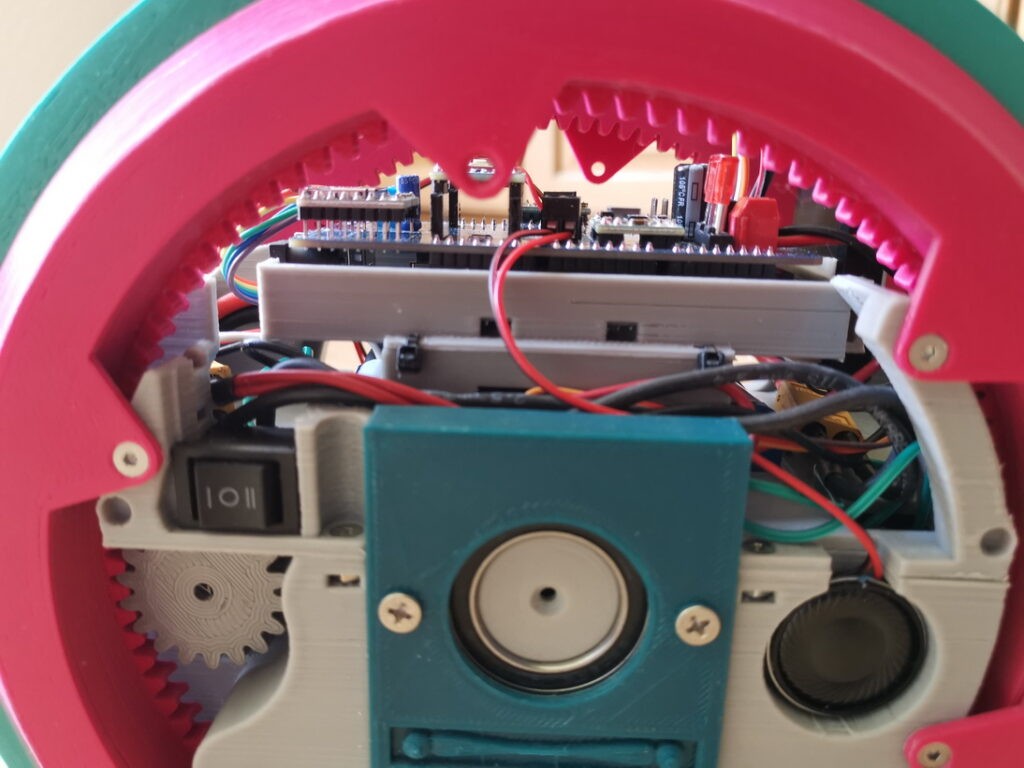
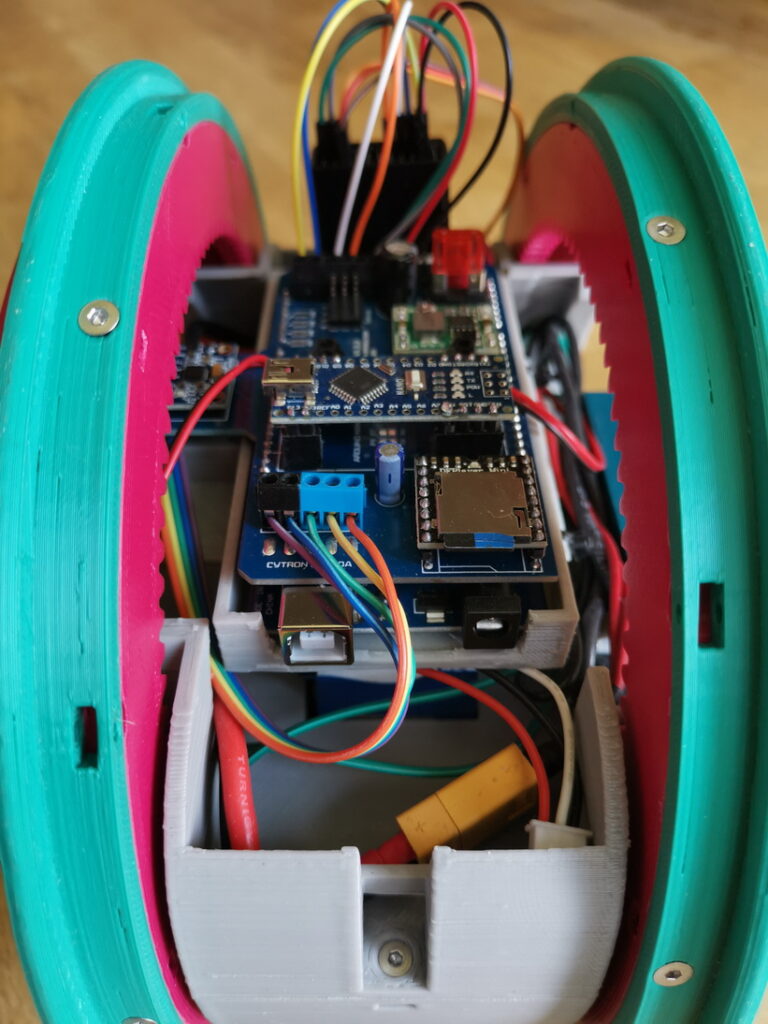
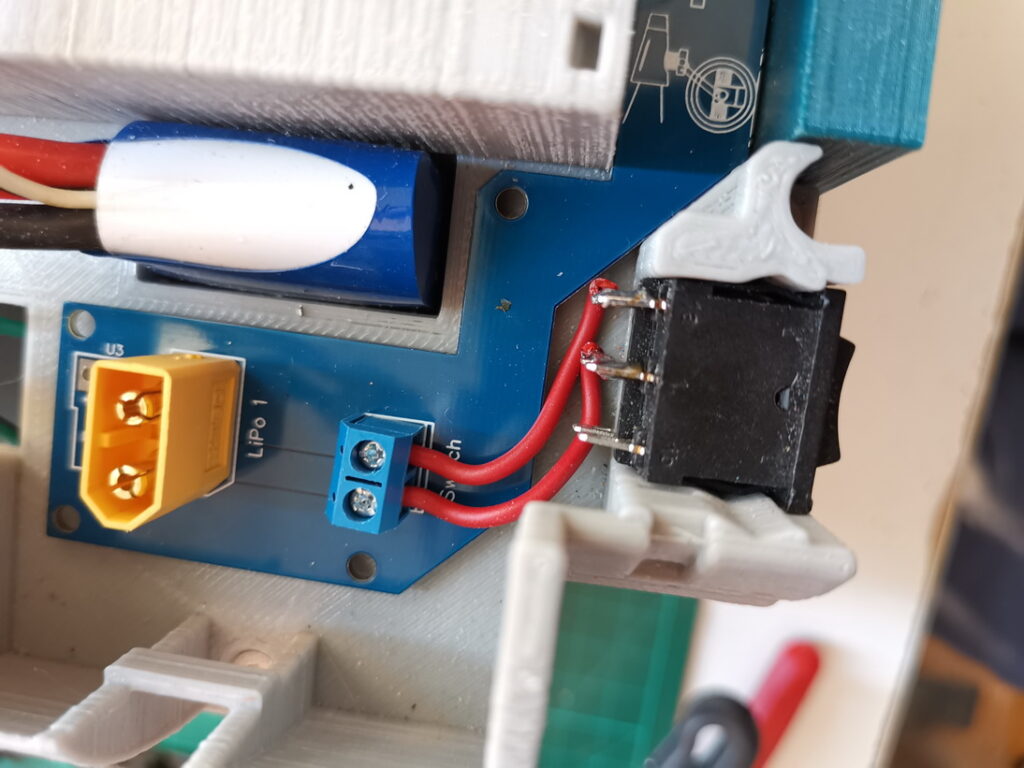
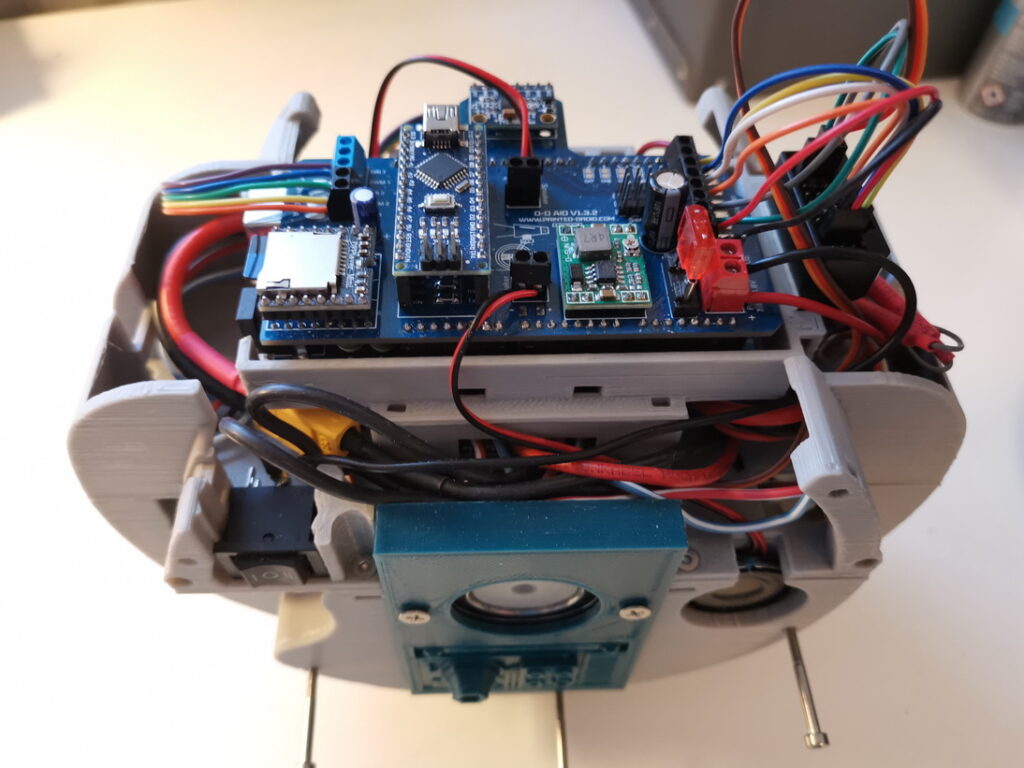
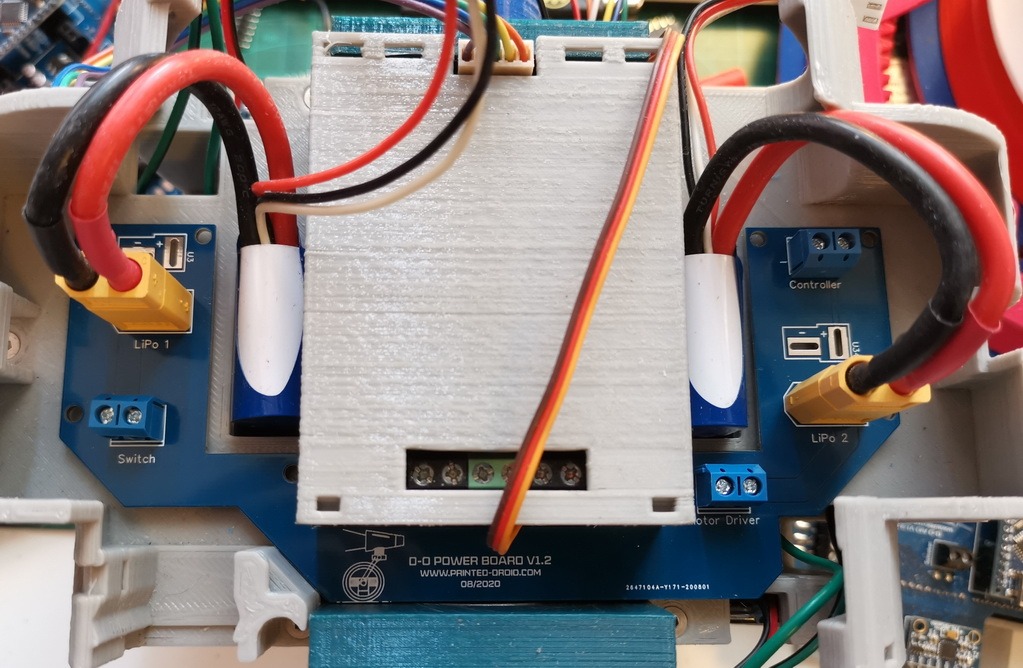
Some sample pictures of the installed boards: