The AstroCan System is a new multipurpose control system concept for almost every droid.
In 2023, Norbert, Reinhard, Jeanette, Stefan and I (Ben) decided to make a new future orientated (but fully current standard electronics compatible) control system from scratch.
The concept:
- It must be possible to migrate step by step from existing systems to the new system
- It should be possible to run old components and new components in parallel, as far as possible
- Reduction of the current wiring as far as possible, especially finally away from this annoying 24-wire slip-ring
(you still need a Slipring for mainpower in the dome or you can use an independet powersource) - Moving away from the USB host shield problem
- New components must be easy to add without complicated changes to the existing cabling
- The system must be secure against external influences and also function stably at fairs and conventions with a lot of radio traffic
- The programming between ATMEGA and ESP32 should be as identical as possible
- Open Source
- Controllable via:
- RC Remote
- Xbox controllers (360 – ONE)
- PS 3-5 Controller incl. PS Move controller
- Nintendo Switch Controller (Joy-Con)
- Smartphone/Tablet
- Special Droid remote
In order to fulfill these requirements, we have decided on the following technical components:
- ESP32 family as the uniform microcontroller generation of the new concept
- ESPNow only as an option, not as a standard communication medium. We are currently afraid of too many interferences at fairs and conventions.
- The established CAN bus from the automotive industry will be the connecting bus system of the new concept. A very robust 2-wire bus system that is easy to install and for which very inexpensive controllers and transmitters are available. The CAN bus supports speeds up to 1MBps and is a multi-master system
- 4-wire slipring for cable-connected installations (VCC, GND, CANH+CANL) or 2-wire slipring when using radio transfer (see CAN-NOW-Bridge below)
- Although the ESP32 supports the CAN protocol out of the box, we use a MCP2515 CAN controller, which can also be run on an Atmel processor with SPI (see above -> unified software on different platforms)
The following components already exist and are currently beeing tested:
- Arduino Mega CAN bus shield for Arduino Mega and Shadow: This shield can be placed on existing Shadow systems without the need for further adjustments to the system, not even to the software. This module is the minimal first step into the Astro CAN world. We will gradually integrate the CAN bus into the Shadow control system
- Single- and Dual-CAN-Bus-Shield for Arduino Mega and Shadow incl. USB-Host-Shield: The goal is to get away from the faulty Host-Shield-2.0 models on the market. The shield integrates the CAN bus as well as the USB mini host shield. Dual-CAN is for CAN experts if you plan to establish two separate bus systems with different speeds for different tasks (e.g. integrating fast sensors with 500kbps or 1Mpbs)
- Penumbra derivative with CAN bus instead of RS485 and some little more extras
- CAN-NOW-Bridge: The only system which intentionally uses ESPNow. It serves as a connection between body and dome. All CAN signals as well as a one serial interface are bridged between dome and body via ESPNow. So it actually only needs a 2-wire slipring for the power supply of the dome, the signals all go via the ESPNow interface
- 232 controller: a module compatible with Troy Flynn’s 232 solution. The mechanics and the motor drivers remain identical, only the AT-Mega is exchanged for the new module based on ESP32 including CAN
- “The Brain”: The new core. An ESP32 with integrated USB host, CAN bus and SD card for central storage of configurations or data of the modules connected to the bus. In addition 3 serial interfaces to control the classic components like Syren, Sabertooth and Marcduinos
- Dome positioning system
Also in planning, design or testing:
- Servo controller boards for dome and body incl. panel animation sequences
- Various sensor boards
Allmost all modules are standardized to 50mm x 40mm and have an identical interface (“Astrobus”), which allows them to be mounted very tightly on the electronics board without extensive wiring. The Astrobus is optional, if you like, you can use free-floating wiring as usual.
Below are a few pictures of already existing components as well as renderings of modules currently in prototype production.
We are open for new ideas and comments, that’s what a community is for!
Main Controller:
The “Main Controllers” are the brain of the system. There are 2 different types of controllers.
Extensions for an existing Shadow MD system or completely new boards if a new system is being built.
AstroCan Pro Dual Shield:
The “AstroCan Pro Dual Shield” is a complete system.
It uses the original Shadow MD Sketch on a Mega2560 and is placed on it as a shield.
Features:
- Onboard USB host
- ESP32 for wireless connection to the rest of the system and for using the system via app
- sound is generated and output on the board
- 2 independent canbus ports
- JTAG
- free pins for individual use

AstroCan Pro Dual Board:
The “AstroCan Pro Dual Boardd” is a complete system.
It uses the original Shadow MD Sketch on a Mega2560. The Mega is a 2560 pro and is on the board.
Features:
- Onboard USB host
- ESP32 for wireless connection to the rest of the system and for using the system via app
- sound is generated and output on the board
- 2 independent canbus ports
- JTAG
- free pins for individual use

Mega Shadow Dual Can Shield:
The “Mega Shadow Can Shield” is a shield for an existing Shadow MD system.
It uses the original Shadow MD Sketch on a Mega2560 and is placed on it as a shield.
Features:
- Onboard USB host
- JTAG
- 2 independent canbus ports
- free pins for individual use

Mega Shadow Can Shield:
The “Mega Shadow Can Shield” is a shield for an existing Shadow MD system.
It uses the original Shadow MD Sketch on a Mega2560 and is placed on it as a shield.
Features:
- Onboard USB host
- JTAG
- 1 canbus connection
- free pins for individual use

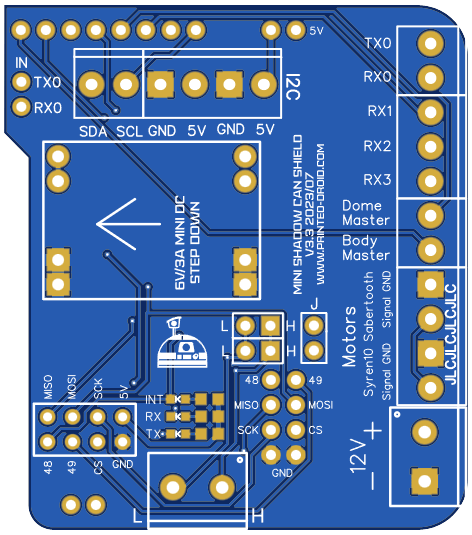
Mini Shadow Can Shield:
The “Mini Shadow Can Shield” is a shield for an existing Shadow MD system.
It uses the original Shadow MD Sketch on a Mega2560/ADK and is placed on it as a shield and expands a MegaADK or a Mega2560 with USBhost shield to include a Canbus connection.
AstroCan Brain:
The “AstroCan Brain” is a new control board.
It offers ShadowMD on an ESP32.
Features:
- USB Host
- Wireless connection to other modules
- Control via app
- 1 Canbus connection
- I2C
- JTAG
- Astrocanbus connection

AstroCan Bridge:
The “AstroCan Bridge” is an interface for existing systems. 2 of these modules (Body/Dome) can expand an existing ShadowMD system to wireless and canbus.
Features:
- Wireless connection to other modules
- 1 Canbus connection
- I2C
- JTAG
- Astrocanbus connection

AstroCan 32 Simple:
The “AstroCan 32 Simple” is a small control board. Shadow MD32 runs on an ESP32 and controls the droid.
Features:
- USB Host
- Wireless connection to other modules
- App usable
- 1 Canbus connection
- 4 serial ports
- I2C
- ServoPWM board on board

Astro32 Serial Bridge:
The “Astro32 Serial Bridge” is used in the dome to wirelessly receive commands for an existing ShadowMD system and to forward them to Benduinos/Betterduinos/Marcduinos/Flthy/Domelift/Teeces.
Features:
- I2C
- 5 serielle Schnittstellen
- 4 freie Pins

Modules:
This modules are for special purposes and are all optional.
Dome Lift Can Controller:
The “Dome Lift Can Controller” controls the dome lift system designed by Matt Zwarts.
It offers full integration into a Shadow MD system.

AstroCan 2-3-2:
The “AstroCan 2-3-2” enables reliable control of a 2-3-2 transition via the Shadow MD system.

AstroCan Autodome:
The “AstroCan Autodome” can rotate and position the dome precisely. Depending on the executed sequence or input.
The system permanently knows the desired and actual status and automatically adjusts and centers itself when the system starts.

AstroCan Sense TOF:
The “AstroCan Sense TOF” is a module that allows TOF (Time-of-flight) sensors to be installed in the droid.
This means that the droid constantly scans the distance to other objects and the module can stop the movement at any time before a collision occurs.
