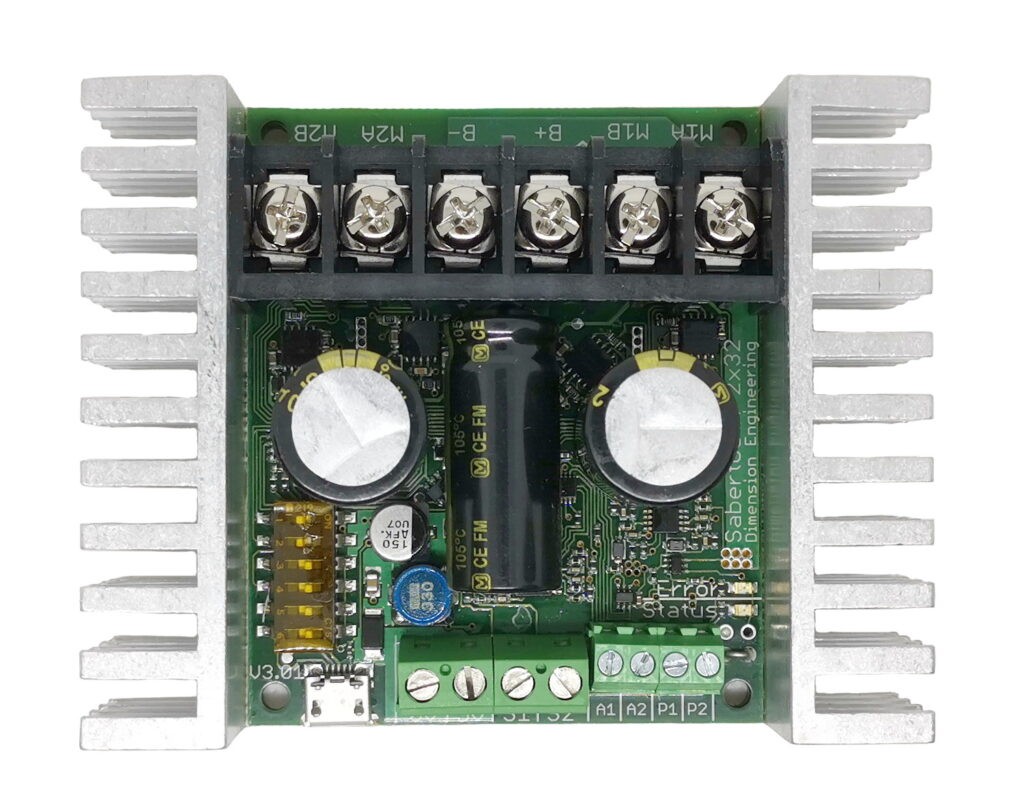
The Sabertooth 2×32 a is the standard motor driver for your R2-D2s feet motors.
I can control 2 individual motors with 32A current each (that’s why it’s the 2x32A version).
The 2x25A version will also work, but the b32A version is mostly cheaper and has more features (which we don’t need).
Overview:
Usually Syren 10 and the Sabertooth motor driver are connected in series and have a 2-wire connection to the Arduino / controller
The connections are (S1&S2 are daisy chained: Controller – Sabertooth -Syren10):
| Astrocomms | Shadow MD | Padawan 360 | Padawan Shadow | |
| S1 | Motor Signal | Serial2 – Tx2 (Pin16) | Serial2 – Tx2 (Pin16) | Serial2 – Tx2 (Pin16) |
| S2 | not connected | not connected | Serial2 – Rx2 (Pin17) | Serial2 – Rx2 (Pin17) |
| 0V | GND | GND | GND | GND |
| B+ | Battery positive |
| B- | Battery negative |
| M1A | Right Motor positive |
| M2A | Right Motor negative |
| M1B | Left Motor positive |
| M1B | Left Motor negative |
1, 2 off
3, 4, 5 & 6 on
Some problems that can occur:
Why are the motors not responding?
It is possible that the baud rate is set incorrectly in the sketch.
Try it with:
2400
9600
19200 (most likely)
38400
The droid moves even though the stick is centered.
The sketches contain a dead zone variable – increase this number until the stick in the neutral position no longer moves the dome
Product Description from the manufacturers website:
Sabertooth 2×32 is a dual channel motor driver capable of supplying 32 amps to two motors, with peak currents up to 64 amps per motor. It can be operated from radio control, analog, TTL serial or USB inputs. It uses regenerative drive and braking for efficient operation. A variety of operating modes including tank style mixing and automatic calibration allow most projects to work immediately out of the box.
In addition to the standard operating modes, Sabertooth 2×32 features additional signal inputs and power outputs, as well as enhanced configuration options.
User-defined operating modes allow for custom operation, such as switching between radio control and computer-driven inputs on the fly, emergency stops or front panel control overrides.
The auxiliary power outputs can be configured to allow the Sabertooth 2×32 to operate from a power supply without a parallel battery, or automatic control of electromagnetic brakes.
When combined with Dimension Engineering’s Kangaroo x2 motion control module, the Sabertooth 2×32 can be used for closed-loop position or speed control with encoder or analog feedback.
The state of the driver can be monitored in real time using the USB port in any operating mode, making debugging your project faster and easier. Sabertooth 2×32 is more flexible, robust and powerful than previous motor drivers, while also being easier to use.
https://www.dimensionengineering.com/products/sabertooth2x32