Overview
The FlthyHP is a sytem to light up your Holoprojectors and add servo movement. It was developed by Ryan Sondgeroth (aka FlthyMcNsty).
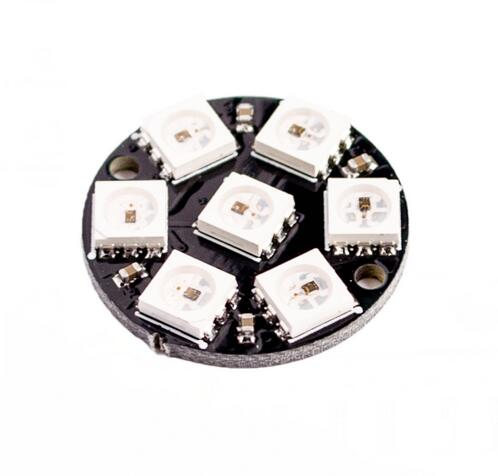
It’s based on the Flthy Breakout Board, 7″bit” RGB Led rings and a 16 Channel 12bit PWM Servo Driver Board (only needed if you want servo movement).
If you’re using Marcduinos, you don’t need the servoboard. The Holoservos are connected with the slave Marcduino.
The complete setup needs an Arduino Pro Mini (or similar), 3 RGB Led and optional 3 slip rings (3 or 6 wires, whatever is cheaper). There’s also a Arduino Breakoutboard that makes connecting easier.
I’d reccomend to use a Slip Ring for the Holoprojectors to reduce the risk of ripping wires through motion or strangers hands.
If you want the holos to move you’ll need an additional PWM Servoboard or a Marcduinosystem.




This is how my LED is mounted and you can see the Slip Ring at the back
Instructions
It’s pretty simple to get this working. You just solder straight header pins to the PCB, a small screw terminal and an IC socket for the Arduino (you can use female oin headers instead). You have to flash the Arduino with the Sketch, vonnect some wires and that’s it. You need to provide the LEDs (and Servos) with a constant 5v Source like the Arduino.
If you want to use servo movement, just ad the PWM Driver board and add 6 SG90 Servos.
For a detailed instruction please read Flthys instructions here:
http://2geekswebdesign.com/FlthyHPs/Manual/FlthyHPsManual_v1.8.pdf
After everything is hooked up and programmed you can expect something like this:
I inserted a plane convex lens and a small plastic diffusor, which looks great for the produced light
Random Servo movement from the Flthy Board
Servomovement, Colors, Speed etc is all configured via the Arduino Sketch.
Please check out the original instructions and sources below:
Flthys Website:
http://www.2geekswebdesign.com/FlthyHPs/
Manuals:
http://www.2geekswebdesign.com/FlthyHPs/Manual/
Current Manual:
http://www.2geekswebdesign.com/FlthyHPs/Manual/FlthyHPsManual_v1.8.pdf
Arduino Sketches:
http://www.2geekswebdesign.com/FlthyHPs/Sketches/
Building a Flthy Holosystem on the cheap
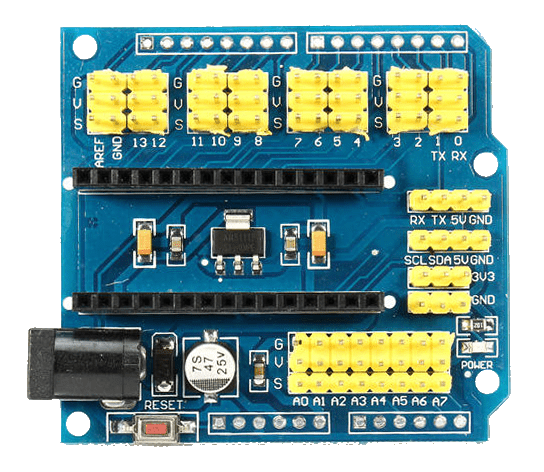
You also can also use a cheap Nano Expansion Board from Aliexpress, eBay etc. instead of the FLTHY Board
What is needed?
1x Arduino Nano Expansion Board (~1.50USD from eBay or 0.50USD from AliExpress)
3x 7 Bit RGB Led WS2812 5050 Led rings (~1USD each from Aliexpress)
1x Arduino Nano (~1.50USD from Aliexpress / eBay)

That’s basicall it. The Nano + the extension board has the same Pins as the normal FlthyHoloboard. All you have to do is find the correct pins on the extension board.
The normal Flthy Holosketch should work perfect.
Pin2 (digital) Front Holo Led
Pin3 (digital) Rear Holo Led
Pin4 (digital) Top Holo Led
Additional Pins are:
Pin9 (digital) RC IN
If you’re using the Marcduinos for the Servos, that’s it. If you use the pwm servoboard you need to connect them at the extension board here:
| Nano Extension Board / Original Flthy Board | PWM Servo Board |
| Ground / G | GND |
| Pin9 (digital) / OE | OE |
| SCL / C | SCL |
| SDA / D | SDA |
| 5V / Vcc | VCC |
| 5V / V | V+ |
