You can now find support for the Domelift in the Betterduino Firmware. To integrate it into ShadowMD, please refer to the Domelift Integration & Betterduino documentation.
The dome lift controller operates using Matt Zwart’s dome lift concept and his code.
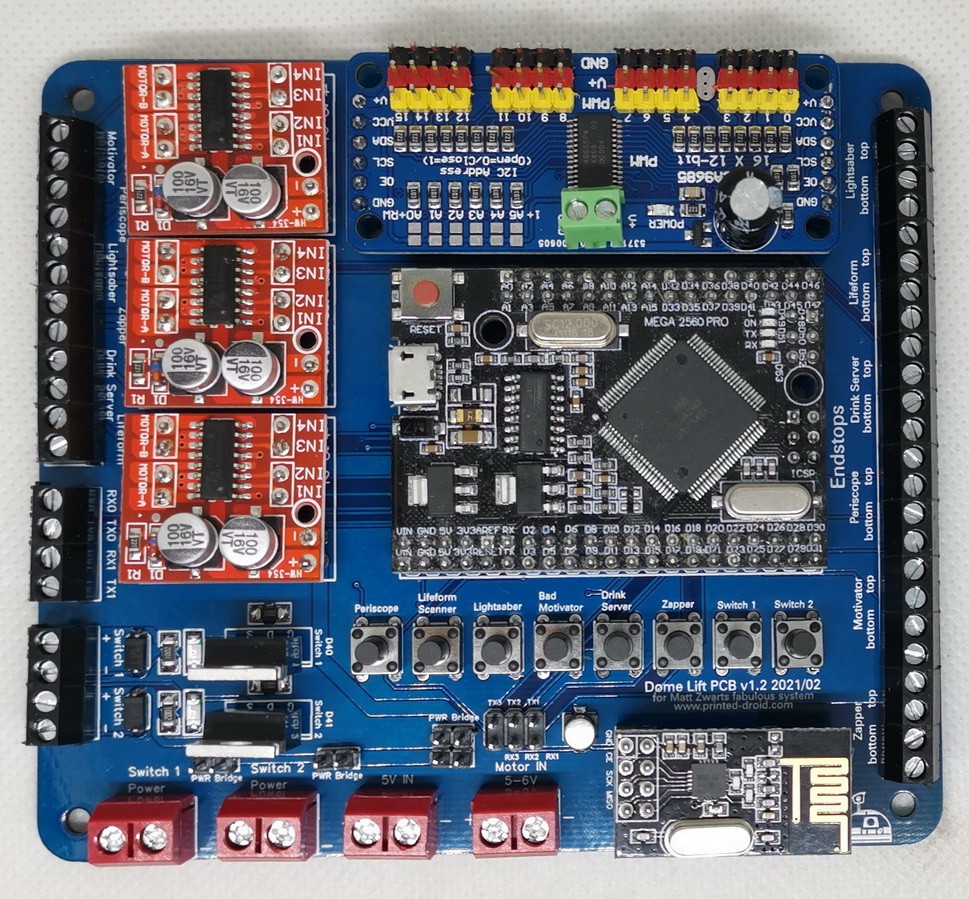
It is powered by an Arduino Mega 2560 pro, a servo PWM board, and 3 motor drivers. Furthermore, certain pins are connected externally, and 2 mosfets are integrated to regulate a smoke machine or similar devices.
An interface for the forthcoming wireless system is also included.
During the wiring- and testing phase, all functions can be managed using buttons.
Eventually, a command structure will be implemented, allowing control via a serial or i2c interface.
- 12 end stops
- 2 controlled mosfet-switches
- 6 motors
- up to 16 servos
The sketch in the file attachment is based on Matt Zwart’s sketch, is not yet final as regards the integration into the Benduino / Marcduino system
Available at shop.printed-droid.com